· Hakan Çelik · OpenCV / Feature Detection · 3 dk
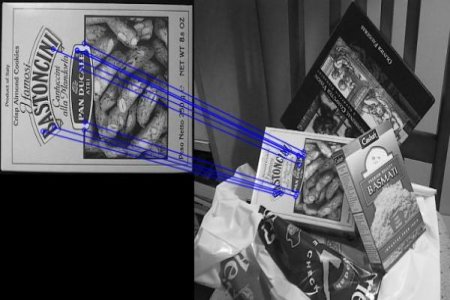
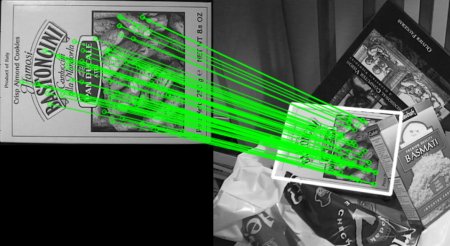
Feature Matching + Homography to find Objects
Learn to combine feature matching and findHomography from the calib3d module to find known objects in complex images. We cover RANSAC-based robust perspective transform estimation.