· Hakan Çelik · OpenCV / Feature Detection · 3 dk okuma
FAST Algorithm for Corner Detection
FAST Algorithm for Corner Detection
Goal
In this chapter,
- We will understand the basics of FAST algorithm
- We will find corners using OpenCV functionalities for FAST algorithm.
Theory
We saw several feature detectors and many of them are really good. But when looking from a real-time application point of view, they are not fast enough. One best example would be SLAM (Simultaneous Localization and Mapping) mobile robot which have limited computational resources.
As a solution to this, FAST (Features from Accelerated Segment Test) algorithm was proposed by Edward Rosten and Tom Drummond in their paper “Machine learning for high-speed corner detection” in 2006.
Feature Detection using FAST
Select a pixel p in the image which is to be identified as an interest point or not. Let its intensity be Ip.
Select appropriate threshold value t.
Consider a circle of 16 pixels around the pixel under test:
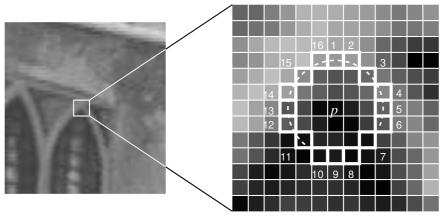
Now the pixel p is a corner if there exists a set of n contiguous pixels in the circle (of 16 pixels) which are all brighter than Ip + t, or all darker than Ip − t. n was chosen to be 12.
A high-speed test was proposed to exclude a large number of non-corners. This test examines only the four pixels at 1, 9, 5 and 13. If p is a corner, then at least three of these must all be brighter than Ip + t or darker than Ip − t.
There are several weaknesses:
- It does not reject as many candidates for n < 12.
- The choice of pixels is not optimal.
- Multiple features are detected adjacent to one another.
First 3 points are addressed with a machine learning approach. Last one is addressed using non-maximal suppression.
States diagram
Non-maximal Suppression
Detecting multiple interest points in adjacent locations is another problem. It is solved by using Non-maximum Suppression.
- Compute a score function V for all the detected feature points. V is the sum of absolute difference between p and 16 surrounding pixels values.
- Consider two adjacent keypoints and compute their V values.
- Discard the one with lower V value.
Summary
It is several times faster than other existing corner detectors. But it is not robust to high levels of noise. It is dependent on a threshold.
FAST Feature Detector in OpenCV
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('blox.jpg', cv.IMREAD_GRAYSCALE)
# Initiate FAST object with default values
fast = cv.FastFeatureDetector_create()
# find and draw the keypoints
kp = fast.detect(img, None)
img2 = cv.drawKeypoints(img, kp, None, color=(255, 0, 0))
# Print all default params
print("Threshold: {}".format(fast.getThreshold()))
print("nonmaxSuppression:{}".format(fast.getNonmaxSuppression()))
print("neighborhood: {}".format(fast.getType()))
print("Total Keypoints with nonmaxSuppression: {}".format(len(kp)))
cv.imwrite('fast_true.png', img2)
# Disable nonmaxSuppression
fast.setNonmaxSuppression(0)
kp = fast.detect(img, None)
print("Total Keypoints without nonmaxSuppression: {}".format(len(kp)))
img3 = cv.drawKeypoints(img, kp, None, color=(255, 0, 0))
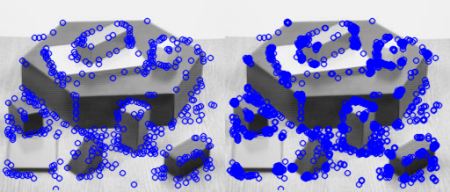
cv.imwrite('fast_false.png', img3)See the results. First image shows FAST with nonmaxSuppression and second one without nonmaxSuppression:
Additional Resources
- Edward Rosten and Tom Drummond, “Machine learning for high speed corner detection” in 9th European Conference on Computer Vision, vol. 1, 2006, pp. 430–443.
- Edward Rosten, Reid Porter, and Tom Drummond, “Faster and better: a machine learning approach to corner detection” in IEEE Trans. Pattern Analysis and Machine Intelligence, 2010, vol 32, pp. 105-119.



