· Hakan Çelik · OpenCV / Camera Calibration · 3 dk
Camera Calibration
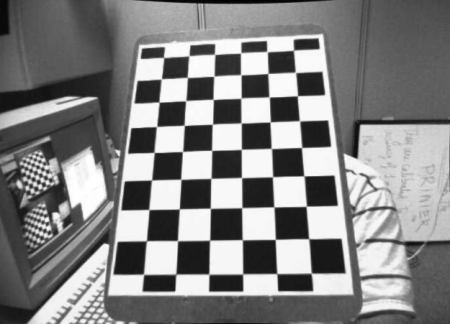
Learn about types of distortion caused by cameras and how to find intrinsic/extrinsic properties. We cover cv.calibrateCamera() and cv.undistort() using a chessboard pattern.
Category
64 posts
Learn about types of distortion caused by cameras and how to find intrinsic/extrinsic properties. We cover cv.calibrateCamera() and cv.undistort() using a chessboard pattern.
Learn background subtraction techniques to detect moving objects in video streams. We cover cv.createBackgroundSubtractorMOG2() and KNN-based background subtraction.
Learn optical flow using Lucas-Kanade and Farneback methods. We cover cv.calcOpticalFlowPyrLK() for sparse and cv.calcOpticalFlowFarneback() for dense optical flow.

Learn to use Meanshift and Camshift algorithms for object tracking in video. We cover cv.meanShift() and cv.CamShift() for histogram-based object tracking.
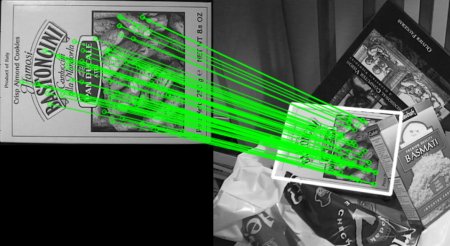
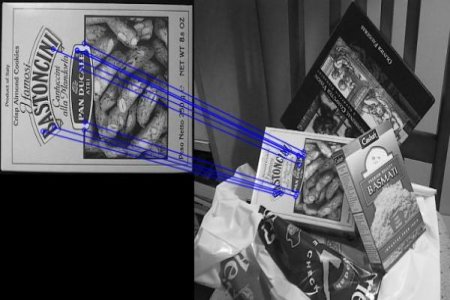
Learn to combine feature matching and findHomography from the calib3d module to find known objects in complex images. We cover RANSAC-based robust perspective transform estimation.
Learn how to match features in one image with others. We cover Brute-Force matcher and FLANN Matcher with ORB and SIFT descriptors in OpenCV.
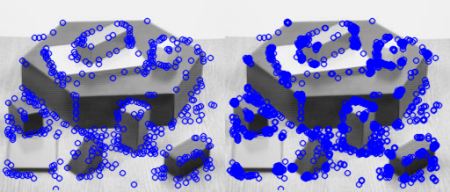
Learn about ORB, a free alternative to SIFT or SURF. We cover cv.ORB_create() for keypoint detection and descriptor computation using FAST + rBRIEF combination.
Learn the basics of BRIEF algorithm, a fast binary descriptor that uses only 32 bytes compared to SIFT's 128 dimensions, enabling high-speed matching with Hamming distance.
Learn about FAST (Features from Accelerated Segment Test) algorithm designed for real-time applications. We cover cv.FastFeatureDetector_create() with and without non-maximal suppression.