· Hakan Çelik · OpenCV / Camera Calibration · 2 dk
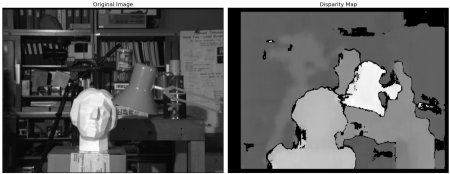
Depth Map from Stereo Images
Learn to create a depth map from stereo images. We cover cv.StereoBM.create() for disparity map computation and the parameters for tuning the results.
OpenCV / Camera Calibration
4 posts
Learn to create a depth map from stereo images. We cover cv.StereoBM.create() for disparity map computation and the parameters for tuning the results.
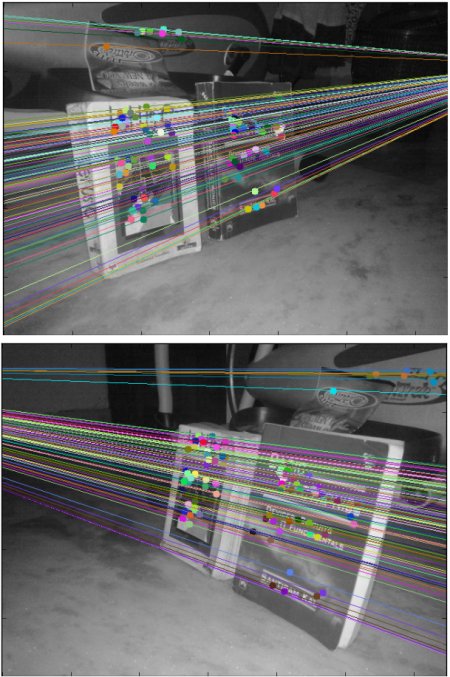
Learn the basics of multiview geometry. We cover epipole, epipolar lines, epipolar constraint, Fundamental Matrix and Essential Matrix, with OpenCV code to find and draw epilines.
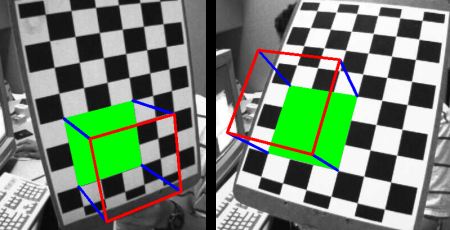
Learn to exploit the calib3d module to create 3D effects in images. We cover cv.solvePnP() and cv.projectPoints() to draw 3D coordinate axes and a cube on a chessboard.
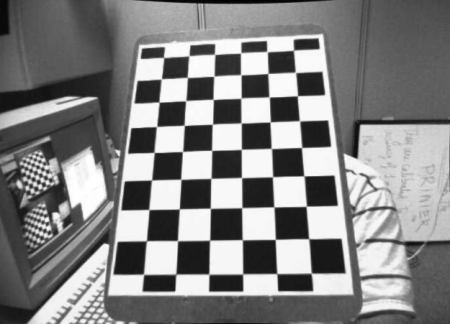
Learn about types of distortion caused by cameras and how to find intrinsic/extrinsic properties. We cover cv.calibrateCamera() and cv.undistort() using a chessboard pattern.