· Hakan Çelik · OpenCV / Özellik Tespiti · 3 dk okuma
Köşe Tespiti için FAST Algoritması
OpenCV Serisi 38/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Köşe Tespiti için FAST Algoritması
Hedefler
Bu bölümde:
- FAST algoritmasının temellerini anlayacağız
- FAST algoritması için OpenCV işlevlerini kullanarak köşeleri bulacağız
Teori
Çeşitli özellik dedektörlerini gördük ve bunların birçoğu gerçekten iyidir. Ancak gerçek zamanlı uygulama bakış açısından yeterince hızlı değiller. Buna iyi bir örnek, sınırlı hesaplama kaynaklarına sahip mobil robot SLAM (Eş Zamanlı Konumlama ve Haritalama) olacaktır.
Buna çözüm olarak, Edward Rosten ve Tom Drummond tarafından 2006’da yayınlanan “Machine learning for high-speed corner detection” adlı makalede FAST (Features from Accelerated Segment Test) algoritması önerildi.
FAST Kullanarak Özellik Tespiti
Görüntüde bir piksel p seçin, yoğunluğu Ip olsun.
Uygun eşik değerini t seçin.
Test edilen pikselin etrafında 16 piksellik bir daire düşünün:
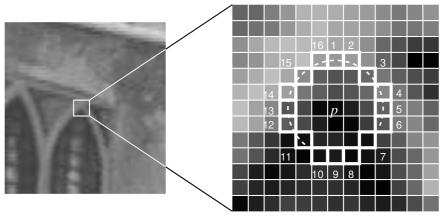
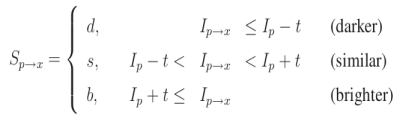
Piksel p, bu 16 piksellik dairede tümü Ip + t’den daha parlak olan veya tümü Ip − t’den daha koyu olan n ardışık piksel varsa bir köşedir (n = 12 seçilmiştir).
Çok sayıda köşe olmayan adayı dışlamak için bir yüksek hızlı test önerildi: Yalnızca 1, 9, 5 ve 13 konumlarındaki dört piksel inceleniyor. p bir köşeyse, bunların en az üçü Ip + t’den daha parlak veya Ip − t’den daha koyu olmalıdır.
Dedektörün çeşitli zayıflıkları vardır:
- n < 12 için fazla aday reddetmiyor
- Piksel seçimi optimal değil
- Bitişik konumlarda birden fazla özellik tespit edilir
İlk 3 nokta makine öğrenmesi yaklaşımıyla, sonuncusu ise maksimum olmayan bastırmayla ele alınır.
Özet Durum Diyagramı
Maksimum Olmayan Bastırma
Bitişik konumlarda birden fazla ilgi noktası tespit etmek başka bir sorundur. Bu, Maksimum Olmayan Bastırma ile çözülür:
- Tespit edilen tüm özellik noktaları için p ile 16 çevre piksel değerleri arasındaki mutlak farklılıkların toplamı olan bir skor fonksiyonu V hesaplanır.
- İki bitişik anahtar nokta düşünüldüğünde, düşük V değerine sahip olanı atılır.
Özet
SIFT’ten birkaç kat daha hızlıdır. Ancak yüksek düzeyde gürültüye karşı sağlam değildir ve bir eşiğe bağlıdır.
OpenCV’de FAST Özellik Dedektörü
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('blox.jpg', cv.IMREAD_GRAYSCALE)
# Varsayılan değerlerle FAST nesnesi başlat
fast = cv.FastFeatureDetector_create()
# Anahtar noktaları bul ve çiz
kp = fast.detect(img, None)
img2 = cv.drawKeypoints(img, kp, None, color=(255, 0, 0))
# Tüm varsayılan parametreleri yazdır
print("Threshold: {}".format(fast.getThreshold()))
print("nonmaxSuppression:{}".format(fast.getNonmaxSuppression()))
print("neighborhood: {}".format(fast.getType()))
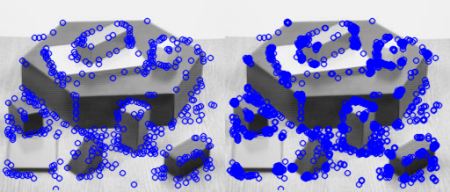
print("Total Keypoints with nonmaxSuppression: {}".format(len(kp)))
cv.imwrite('fast_true.png', img2)
# nonmaxSuppression'ı devre dışı bırak
fast.setNonmaxSuppression(0)
kp = fast.detect(img, None)
print("Total Keypoints without nonmaxSuppression: {}".format(len(kp)))
img3 = cv.drawKeypoints(img, kp, None, color=(255, 0, 0))
cv.imwrite('fast_false.png', img3)Sonuçlar — birincisi nonmaxSuppression ile, ikincisi olmadan:
Ek Kaynaklar
- Edward Rosten and Tom Drummond, “Machine learning for high speed corner detection” in 9th European Conference on Computer Vision, vol. 1, 2006, pp. 430–443.
- Edward Rosten, Reid Porter, and Tom Drummond, “Faster and better: a machine learning approach to corner detection” in IEEE Trans. Pattern Analysis and Machine Intelligence, 2010, vol 32, pp. 105-119.



