· Hakan Çelik · OpenCV / Özellik Tespiti · 3 dk okuma
Harris Köşe Tespiti
OpenCV Serisi 34/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Harris Köşe Tespiti
Hedefler
Bu bölümde:
- Harris Köşe Tespiti’nin arkasındaki kavramları anlayacağız
- Şu fonksiyonları göreceğiz: cv.cornerHarris(), cv.cornerSubPix()
Teori
Son bölümde, görüntüdeki köşelerin tüm yönlerde yoğunluk açısından büyük varyasyon gösteren bölgeler olduğunu gördük. Bu köşeleri bulmak için ilk girişimlerden biri, 1988 yılında A Combined Corner and Edge Detector adlı makalelerinde Chris Harris & Mike Stephens tarafından yapılmıştır; şimdi Harris Köşe Dedektörü olarak adlandırılır.
Temel fikir, tüm yönlerde (u, v) kaydırma için yoğunluktaki farkı bulmaktır:
E(u,v) = Σ w(x,y) [I(x+u,y+v) - I(x,y)]²
Pencere fonksiyonu, altındaki piksellere ağırlık veren dikdörtgen veya Gauss penceresidir.
Bu fonksiyonu köşe tespiti için maksimize etmemiz gerekir. Taylor açılımı ve bazı matematiksel adımlar uygulandıktan sonra:
E(u,v) ≈ [u v] M [u; v]
burada:
M = Σ w(x,y) [[Ix² IxIy]; [IxIy Iy²]]
Burada Ix ve Iy, sırasıyla x ve y yönlerindeki görüntü türevidir.
Ardından bir pencerenin köşe içerip içermediğini belirleyen bir skor denklemi oluşturulur:
R = det(M) - k(trace(M))²
burada:
- det(M) = λ₁λ₂
- trace(M) = λ₁ + λ₂
- λ₁ ve λ₂, M’nin özdegerleridir
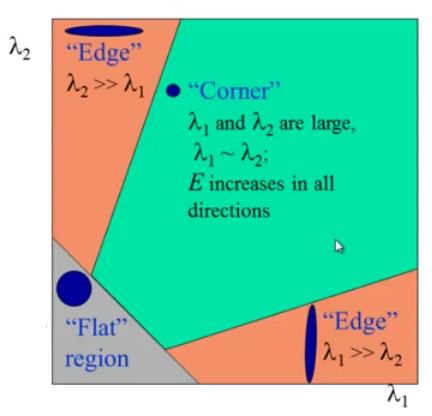
Özdegerlerin büyüklükleri, bir bölgenin köşe, kenar veya düz olup olmadığını belirler:
- |R| küçükse (λ₁ ve λ₂ küçük) → düz bölge
- R < 0 ise (λ₁ >> λ₂ veya tersi) → kenar
- R büyükse (λ₁ ve λ₂ büyük ve λ₁ ≈ λ₂) → köşe
Bu güzel bir resimle gösterilebilir:
OpenCV’de Harris Köşe Dedektörü
OpenCV bu amaç için cv.cornerHarris() fonksiyonuna sahiptir. Argümanları:
- img — Giriş görüntüsü. Gri tonlamalı ve float32 tipinde olmalıdır.
- blockSize — Köşe tespiti için dikkate alınan komşuluk boyutu
- ksize — Kullanılan Sobel türevinin açıklık parametresi
- k — Harris dedektörünün serbest parametresi
Aşağıdaki örneğe bakın:
import numpy as np
import cv2 as cv
filename = 'chessboard.png'
img = cv.imread(filename)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv.cornerHarris(gray, 2, 3, 0.04)
# Köşeleri işaretlemek için sonuç genişletilir
dst = cv.dilate(dst, None)
# Optimal değer için eşik, görüntüye göre değişebilir
img[dst > 0.01 * dst.max()] = [0, 0, 255]
cv.imshow('dst', img)
if cv.waitKey(0) & 0xff == 27:
cv.destroyAllWindows()Aşağıda sonuç gösterilmektedir:
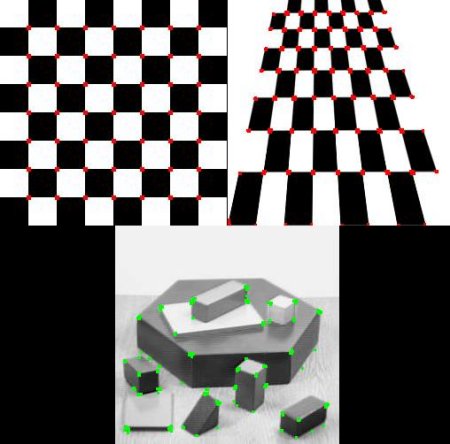
Alt Piksel Hassasiyetiyle Köşe Tespiti
Bazen köşeleri maksimum hassasiyetle bulmanız gerekebilir. OpenCV, alt piksel hassasiyetiyle tespit edilen köşeleri daha da geliştiren cv.cornerSubPix() fonksiyonuna sahiptir. Aşağıda bir örnek verilmiştir. Harris köşelerini bulduktan sonra bu köşelerin centroidlerini fonksiyona geçiriyoruz. Harris köşeleri kırmızı piksellerle, rafine edilmiş köşeler ise yeşil piksellerle işaretlenir:
import numpy as np
import cv2 as cv
filename = 'chessboard2.jpg'
img = cv.imread(filename)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# Harris köşelerini bul
gray = np.float32(gray)
dst = cv.cornerHarris(gray, 2, 3, 0.04)
dst = cv.dilate(dst, None)
ret, dst = cv.threshold(dst, 0.01 * dst.max(), 255, 0)
dst = np.uint8(dst)
# Centroidleri bul
ret, labels, stats, centroids = cv.connectedComponentsWithStats(dst)
# Durma ve köşeleri rafine etme kriterini tanımla
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv.cornerSubPix(gray, np.float32(centroids), (5, 5), (-1, -1), criteria)
# Çiz
res = np.hstack((centroids, corners))
res = np.int0(res)
img[res[:, 1], res[:, 0]] = [0, 0, 255]
img[res[:, 3], res[:, 2]] = [0, 255, 0]
cv.imwrite('subpixel5.png', img)Aşağıda bazı önemli konumların yakınlaştırılmış pencerede gösterildiği sonuç verilmiştir:
![]()



