· Hakan Çelik · OpenCV / İleri Konular · 4 dk okuma
Kontur Özellikleri
OpenCV Serisi 27/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Kontur Özellikleri
Hedefler
Bu makalede öğrenecekleriniz:
- Konturların alan, çevre, ağırlık merkezi, sınır kutusu gibi farklı özelliklerini bulmak
- Konturlarla ilgili pek çok fonksiyon göreceksiniz
1. Momentler
Görüntü momentleri, nesnenin ağırlık merkezi, alan gibi bazı özellikleri hesaplamanıza yardımcı olur.
cv2.moments() fonksiyonu, hesaplanan tüm moment değerlerinin bir sözlüğünü döndürür:
import numpy as np
import cv2 as cv
img = cv.imread('star.jpg', cv.IMREAD_GRAYSCALE)
assert img is not None, "Dosya okunamadı, os.path.exists() ile kontrol edin"
ret, thresh = cv.threshold(img, 127, 255, 0)
contours, hierarchy = cv.findContours(thresh, 1, 2)
cnt = contours[0]
M = cv.moments(cnt)
print(M)Bu momentlerden alan, ağırlık merkezi gibi faydalı veriler elde edebilirsiniz. Ağırlık merkezi şu bağıntılarla verilir: Cx = M10 / M00 ve Cy = M01 / M00:
cx = int(M['m10'] / M['m00'])
cy = int(M['m01'] / M['m00'])2. Kontur Alanı
Kontur alanı cv2.contourArea() fonksiyonu veya momentlerden M['m00'] ile elde edilir:
area = cv.contourArea(cnt)3. Kontur Çevresi
Yay uzunluğu olarak da adlandırılır. cv2.arcLength() fonksiyonu ile bulunabilir. İkinci argüman şeklin kapalı bir kontur mu (True geçilirse) yoksa sadece bir eğri mi olduğunu belirtir:
perimeter = cv.arcLength(cnt, True)4. Kontur Yaklaşımı
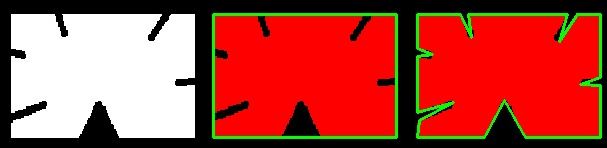
Belirlediğimiz hassasiyete bağlı olarak bir kontur şeklini daha az köşe noktalı başka bir şekle yaklaştırır. Bu, Douglas-Peucker algoritmasının bir uygulamasıdır.
Bunu anlamak için görüntüde bir kare bulmaya çalıştığınızı, ancak bazı sorunlar nedeniyle mükemmel bir kare değil “bozuk bir şekil” elde ettiğinizi düşünün. Şimdi bu fonksiyonu kullanarak şekli yaklaştırabilirsiniz. İkinci argüman epsilon’dır; kontur ile yaklaşık kontur arasındaki maksimum uzaklıktır. Doğru çıktıyı elde etmek için epsilon’ın akıllıca seçilmesi gerekir:
epsilon = 0.1 * cv.arcLength(cnt, True)
approx = cv.approxPolyDP(cnt, epsilon, True)Aşağıda ikinci görüntüde yeşil çizgi, yay uzunluğunun %10’u kadar epsilon için yaklaştırılmış eğriyi göstermektedir. Üçüncü görüntü, yay uzunluğunun %1’i kadar epsilon için aynı durumu göstermektedir:
5. Dışbükey Zarf (Convex Hull)
Dışbükey zarf, kontur yaklaşımına benzeyebilir ancak aynı değildir. cv2.convexHull() fonksiyonu bir eğriyi dışbükeylik kusurları açısından kontrol eder ve düzeltir. Genel olarak dışbükey eğriler, her zaman dışa doğru şişmiş veya en azından düz olan eğrilerdir. İçe doğru şişmişse buna dışbükeylik kusuru denir. Örneğin el görüntüsüne bakın. Kırmızı çizgi elin dışbükey zarfını göstermektedir. Çift taraflı ok işaretleri, zarfın konturlardan yerel maksimum sapmalarını gösteren dışbükeylik kusurlarını işaret etmektedir:

Sözdizimi hakkında:
hull = cv.convexHull(points[, hull[, clockwise[, returnPoints]]])Argüman ayrıntıları:
- points: İçine aktardığımız konturlardır.
- hull: Çıktıdır, genellikle atlıyoruz.
- clockwise: Yönelim bayrağı. True ise çıktı dışbükey zarfı saat yönünde yönelimlidir; aksi hâlde saat yönünün tersindedir.
- returnPoints: Varsayılan olarak True. O zaman zarf noktalarının koordinatlarını döndürür. False ise zarf noktalarına karşılık gelen kontur noktalarının indekslerini döndürür.
Yukarıdaki görüntüdeki gibi bir dışbükey zarf elde etmek için aşağıdaki yeterlidir:
hull = cv.convexHull(cnt)6. Dışbükeylik Kontrolü
Bir eğrinin dışbükey olup olmadığını kontrol etmek için cv2.isContourConvex() fonksiyonu vardır. Yalnızca True veya False döndürür:
k = cv.isContourConvex(cnt)7. Sınır Dikdörtgeni
İki tür sınır dikdörtgeni vardır.
7a. Düz Sınır Dikdörtgeni
Nesnenin dönüşünü dikkate almayan düz bir dikdörtgendir. cv2.boundingRect() fonksiyonu ile bulunur. (x, y) dikdörtgenin sol üst koordinatı, (w, h) ise genişliği ve yüksekliğidir:
x, y, w, h = cv.boundingRect(cnt)
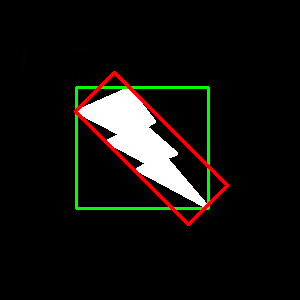
cv.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)7b. Döndürülmüş Dikdörtgen
Burada sınır dikdörtgeni minimum alanla çizilir, bu nedenle dönüşü de dikkate alır. Kullanılan fonksiyon cv2.minAreaRect()’tir. Şu ayrıntıları içeren bir Box2D yapısı döndürür: (merkez (x, y), (genişlik, yükseklik), dönüş açısı). Ancak bu dikdörtgeni çizmek için cv2.boxPoints() fonksiyonu ile 4 köşeye ihtiyaç duyarız:
rect = cv.minAreaRect(cnt)
box = cv.boxPoints(rect)
box = np.int0(box)
cv.drawContours(img, [box], 0, (0, 0, 255), 2)Her iki dikdörtgen tek bir görüntüde gösterilmiştir. Yeşil dikdörtgen normal sınır dikdörtgeni, kırmızı dikdörtgen ise döndürülmüş dikdörtgendir:
8. Minimum Kapsayan Daire
Sonraki adımda cv2.minEnclosingCircle() fonksiyonu ile bir nesnenin çevrel dairesini buluruz. Bu, nesneyi minimum alanla tamamen kapsayan bir dairedir:
(x, y), radius = cv.minEnclosingCircle(cnt)
center = (int(x), int(y))
radius = int(radius)
cv.circle(img, center, radius, (0, 255, 0), 2)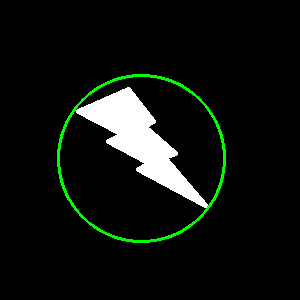
9. Elips Uydurma
Sonraki adım, bir nesneye elips uydurmaktır. Elipsin içine yerleştirildiği döndürülmüş dikdörtgeni döndürür:
ellipse = cv.fitEllipse(cnt)
cv.ellipse(img, ellipse, (0, 255, 0), 2)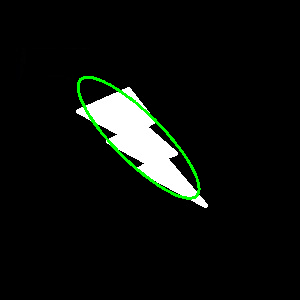
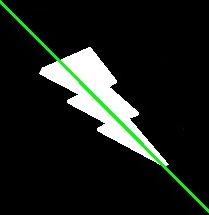
10. Doğru Uydurma
Benzer biçimde bir dizi noktaya doğru uydurabiliriz. Aşağıdaki görüntü bir dizi beyaz nokta içermektedir. Ona düz bir doğru yaklaştırabiliriz:
rows, cols = img.shape[:2]
[vx, vy, x, y] = cv.fitLine(cnt, cv.DIST_L2, 0, 0.01, 0.01)
lefty = int((-x * vy / vx) + y)
righty = int(((cols - x) * vy / vx) + y)
cv.line(img, (cols - 1, righty), (0, lefty), (0, 255, 0), 2)