· Hakan Çelik · OpenCV / Özellik Tespiti · 2 dk okuma
ORB (Yönlü FAST ve Döndürülmüş BRIEF)
OpenCV Serisi 40/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
ORB (Yönlü FAST ve Döndürülmüş BRIEF)
Hedefler
Bu bölümde ORB’un temellerini göreceğiz.
Teori
OpenCV meraklısı olarak, ORB hakkındaki en önemli şey “OpenCV Labs”dan gelmesidir. Bu algoritma, Ethan Rublee, Vincent Rabaud, Kurt Konolige ve Gary R. Bradski tarafından 2011 yılındaki ORB: An efficient alternative to SIFT or SURF adlı makalede ortaya atılmıştır. Başlıktan da anlaşılacağı gibi, hesaplama maliyeti, eşleştirme performansı ve özellikle de patentler açısından SIFT ve SURF’e iyi bir alternatiftir. Evet, SIFT ve SURF patentlidir ve bunları kullanmak için ödeme yapmanız gerekir. Ancak ORB değil!!!
ORB temel olarak, performansı artırmak için birçok modifikasyon yapılmış FAST anahtar nokta dedektörü ve BRIEF tanımlayıcısının bir füzyonudur. İlk olarak anahtar noktaları bulmak için FAST’ı kullanır, ardından bunlar arasından ilk N noktayı bulmak için Harris köşe ölçüsünü uygular. Çok ölçekli özellikler üretmek için de piramit kullanır.
Ancak FAST yönelimi hesaplamaz. Yazarlar şu modifikasyonu önerdi: Köşeyi merkezde konumlanmış yamanın yoğunluk ağırlıklı centroidini hesaplar. Bu köşe noktasından centroide uzanan vektörün yönü, yönelimi verir.
Tanımlayıcılar için ORB, BRIEF tanımlayıcılarını kullanır. Ancak BRIEF döndürmeyle kötü performans gösterir. Bu nedenle ORB, BRIEF’i anahtar noktaların yönelimine göre “yönlendirir”. Bu rBRIEF olarak adlandırılır.
Tanımlayıcı eşleştirmesi için, geleneksel LSH’yi geliştiren çok araştırmalı LSH kullanılır. Makale, ORB’un SURF ve SIFT’ten çok daha hızlı olduğunu ve ORB tanımlayıcısının SURF’ten daha iyi çalıştığını söylemektedir. ORB, panorama dikişi vb. için düşük güçlü cihazlarda iyi bir seçimdir.
OpenCV’de ORB
Her zamanki gibi, cv.ORB() fonksiyonu veya feature2d ortak arayüzü kullanılarak bir ORB nesnesi oluşturulur. Birçok isteğe bağlı parametreye sahiptir. En kullanışlıları: varsayılan olarak 500 olan nFeatures ve Harris veya FAST skoruna göre özelliklerin sıralanıp sıralanmayacağını belirten scoreType. Başka bir parametre olan WTA_K, yönlü BRIEF tanımlayıcısının her öğesini üreten nokta sayısına karar verir. Varsayılan olarak ikidir (NORM_HAMMING mesafesi kullanılır). WTA_K 3 veya 4 ise NORM_HAMMING2 kullanılır.
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('simple.jpg', cv.IMREAD_GRAYSCALE)
# ORB dedektörünü başlat
orb = cv.ORB_create()
# ORB ile anahtar noktaları bul
kp = orb.detect(img, None)
# ORB ile tanımlayıcıları hesapla
kp, des = orb.compute(img, kp)
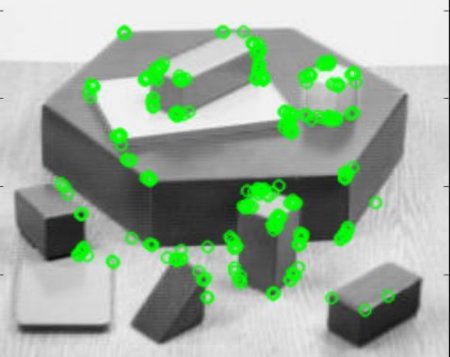
# Yalnızca anahtar nokta konumlarını çiz, boyut ve yönelim değil
img2 = cv.drawKeypoints(img, kp, None, color=(0, 255, 0), flags=0)
plt.imshow(img2), plt.show()Sonuç:
ORB özellik eşleştirmesini başka bir bölümde yapacağız.
Ek Kaynaklar
- Ethan Rublee, Vincent Rabaud, Kurt Konolige, Gary R. Bradski: ORB: An efficient alternative to SIFT or SURF. ICCV 2011: 2564-2571.



