· Hakan Çelik · OpenCV / Görüntü İşleme · 3 dk okuma
Canny Kenar Algılama
OpenCV Serisi 2/64
- 1. Boya Fırçası Olarak Fare
- 2. Canny Kenar Algılama
- 3. Görüntü Geçişleri
- 4. Görüntü Piramitleri
- 5. Görüntülerde Aritmetik İşlemler
- 6. Görüntülerle İlgili Temel İşlemler
- 7. Görüntünün Geometrik Dönüşümleri
- 8. Görüntüyü Yumuşatma - ( Smoothing Images )
- 9. Histogramlar
- 10. Konturler ( Contours )
- 11. Morfolojik Dönüşümler
- 12. Opencv Nedir Ve Kurulumu
- 13. Opencv Resim Işlemleri
- 14. Opencv Video Işlemleri
- 15. Opencv'de Çizim Fonksiyonları
- 16. Performans Ölçüm Ve Geliştirme Teknikleri
- 17. Renk Alanlarını Değiştirme
- 18. Renk Paleti Olarak Parça Çubuğu ( Trackbar )
- 19. Resim Eşikleme
- 20. Şablon Eşleştirme
- 21. Hough Doğru Dönüşümü
- 22. Hough Daire Dönüşümü
- 23. Fourier Dönüşümü
- 24. Histogram Eşitleme
- 25. 2B Histogramlar
- 26. Histogram Geri Projeksiyonu
- 27. Kontur Özellikleri
- 28. Kontur Nitelikleri
- 29. Konturlerle Daha Fazla İşlev
- 30. Kontur Hiyerarşisi
- 31. GrabCut ile Etkileşimli Ön Plan Çıkarma
- 32. Watershed Algoritması ile Görüntü Segmentasyonu
- 33. Özellikleri Anlamak
- 34. Harris Köşe Tespiti
- 35. Shi-Tomasi Köşe Dedektörü ve İzlenecek İyi Özellikler
- 36. SIFT'e Giriş (Ölçek Değişmez Özellik Dönüşümü)
- 37. SURF'e Giriş (Hızlandırılmış Sağlam Özellikler)
- 38. Köşe Tespiti için FAST Algoritması
- 39. BRIEF — İkili Sağlam Bağımsız Temel Özellikler
- 40. ORB (Yönlü FAST ve Döndürülmüş BRIEF)
- 41. Özellik Eşleştirme
- 42. Özellik Eşleştirme + Nesneleri Bulmak için Homografi
- 43. Meanshift ve Camshift ile Nesne Takibi
- 44. Optik Akış
- 45. Arka Plan Çıkarma
- 46. Kamera Kalibrasyonu
- 47. Poz Tahmini
- 48. Epipolar Geometri
- 49. Stereo Görüntülerden Derinlik Haritası
- 50. k-En Yakın Komşuyu Anlamak
- 51. kNN ile El Yazısı OCR
- 52. SVM'yi Anlamak
- 53. SVM ile El Yazısı OCR
- 54. K-Ortalamalar Kümeleme'yi Anlamak
- 55. OpenCV'de K-Ortalamalar Kümeleme
- 56. Görüntü Gürültü Giderme
- 57. Görüntü Onarımı (Inpainting)
- 58. Yüksek Dinamik Aralık (HDR) Görüntüleme
- 59. Haar Cascade ile Yüz Tespiti
- 60. pip ile OpenCV Kurulumu
- 61. Ubuntu'da OpenCV-Python Kurulumu
- 62. Fedora'da OpenCV-Python Kurulumu
- 63. Windows'ta OpenCV-Python Kurulumu
- 64. OpenCV-Python Bağlayıcıları Nasıl Çalışır?
Canny Kenar Algılama
Hedefler
- Canny kenar algılama kavramı
- Bunun işlem için OpenCV fonksiyonlarından :
cv2.Canny()
Teori
Canny kenar algılama algoritması popüler olan bir kenar algılama algoritmasıdır. 1986 yılında John F. Canny tarafından geliştirilmiştir. Bu çok aşamalı bir algoritmadır ve biz hepsini öğreneceğiz.
Kirlilik Azaltma
Kenar tespiti görüntüdeki kirliliğe karşı hassas olduğu için, ilk adım görüntüdeki kirliliği 5x5 Gaussian filter ile kaldırmaktır. Bunu daha önceki bölümlerde zaten gördük.
Görüntünün Yoğunluk Gradyanını Bulma
Düzeltilmiş görüntü yatay yönde  ve dikey yönde
ve dikey yönde  birinci türev elde etmek için yatay ve dikey yönde bir Sobel çekirdeğiyle filtrelenir. Bu iki resimden, her piksel için kenar eğimini ve yönünü aşağıdaki gibi bulabilirsiniz:
birinci türev elde etmek için yatay ve dikey yönde bir Sobel çekirdeğiyle filtrelenir. Bu iki resimden, her piksel için kenar eğimini ve yönünü aşağıdaki gibi bulabilirsiniz:

Gradyan yönü ( Gradient direction ) her zaman kenarlara diktir. Dikey, yatay ve iki diyagonal yönde dört açıdan birine yuvarlanır.
Maksimum Olmayan Bastırma ( Non-maximum Suppression )
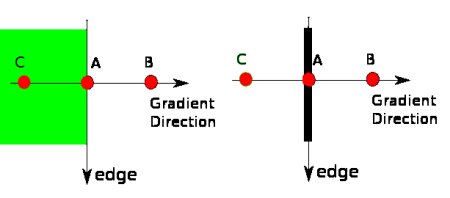
Eğim büyüklüğü ve yönünü aldıktan sonra, kenar oluşturmayan istenmeyen pikselleri kaldırmak için görüntünün tam bir taraması yapılır. Bunun için, her pikselde, pikselin gradyan yönündeki komşusundan yerel bir maksimum olup olmadığı kontrol edilir. Aşağıdaki görüntüyü kontrol edin:
A noktası kenarındadır (dikey yönde). Gradyan yönü kenarın normalidir. B ve C noktası gradyan yönündedir. Böylece, nokta A, yerel maksimum oluşturup oluşturmadığını görmek için B ve noktaları ile kontrol edilir. Eğer öyleyse bir sonraki aşamada kabul edilir, aksi takdirde baskı yapılır (sıfıra getirilir). Kısacası elde ettiğiniz sonuç, “ince kenarlar” içeren bir ikili görüntüdür.
Histerik Eşik ( Hysteresis Thresholding )
Bu aşamada tüm kenarların gerçek bir kenar olup olmadığı kontrol edilir. Bunun için, iki eşik değer olan minVal ( minimum değer ) ve maxVal’ye ( maksimum değer ) ihtiyacımız var. Yoğunluk gradyantı maxVal ( maksimum değer ) ‘dan daha fazla olan kenarların kesinlikle kenardır ve minVal ( minimum değer )‘ın altındaki kenarların ise gerçek kenar olmayacağından emin olunur, bu işlem bu şekilde geçilir. Bu iki eşik değeri ( maksimum ve minimum ) ile sınıflandırılır. Onlar gerçek kenar piksellerine bağlı ise kenarların bir parçası olarak kabul edilir ve diğer leri yani kenar olmayanlar atılır. Aşağıdaki görüntüye bakın.
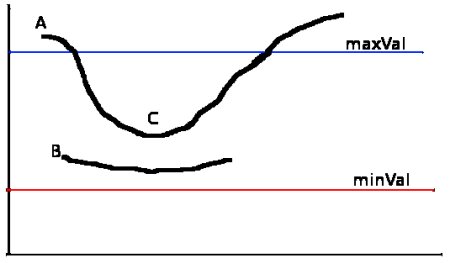
A kenarı, “kesin kenar” olarak kabul edilen maxVal’ın üstündedir. Kenar C, maxVal’ın altında olmasına rağmen, kenar A’ya bağlıdır, böylece geçerli kenar olarak da düşünülür ve bu tam eğri elde edilir. Fakat Kenar B, minVal’ın üstünde ve Kenar C ile aynı bölgede olmasına rağmen, herhangi bir “kesin-kenara” bağlı değildir, böylece bu çıkartılır. Dolayısıyla doğru sonuca ulaşmak için minVal ve maxVal değerlerini buna göre seçmemiz çok önemlidir.
Bu aşama, kenarların uzun çizgiler olduğu varsayımıyla küçük piksel kirliliği çıkartır.
Dolayısıyla nihayetinde elde ettiğimiz, görselde güçlü kenarlar kalır.
OpenCV’de Canny Kenar Algılama
Opencv yukarıda işin teorik kısmında bahsettiğimiz olayları cv2.Canny() fonksiyonu ile yapar. Şimdi bu fonksiyonun nasıl kullanacağımızı göreceğiz.
- ilk parametremiz girdi argümanı yani görselimizdir.
- ikinci ve
- üçüncü parametreler sırası ile minimum ve maksimum değerlerdir.
- dördüncü argüman, aperture_size’dir. Resim gradyanları bulmak için kullanılan Sobel çekirdeği boyutudur. Varsayılan olarak 3’tür.
- Son argüman, gradyan büyüklüğünü bulma denklemini belirten L2gradient’tir. Doğruysa, yukarıda belirtilen doğru denklemi kullanır, aksi takdirde bu işlevi kullanır:

import cv2
import numpy as np
from matplotlib import pyplot as plt
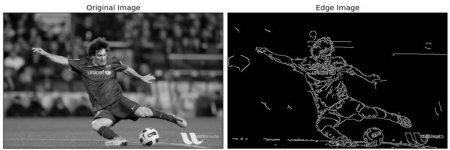
img = cv2.imread('messi5.jpg',0)
edges = cv2.Canny(img,100,200)
plt.subplot(121),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image'), plt.xticks([]), plt.yticks([])
plt.show()Sonuç;